全国咨询热线
专业从事海洋信息技术研发及应用,船舶技术研发;海洋环境监测;海洋信息服务;船舶仪器设备及配件、科研实验仪器的贸易及安装;海洋工程施工等
基于我们对客户要求的深刻了解和我们的实际专业经验,极大化满足客户严苛的要求

4月24日,有青岛霍金海洋高新科技有限公司主要牵头组织,某石化公司的声学多普勒海流剖面仪在线系统在日照岚山港油6泊位圆满完成既定...
详情 >>
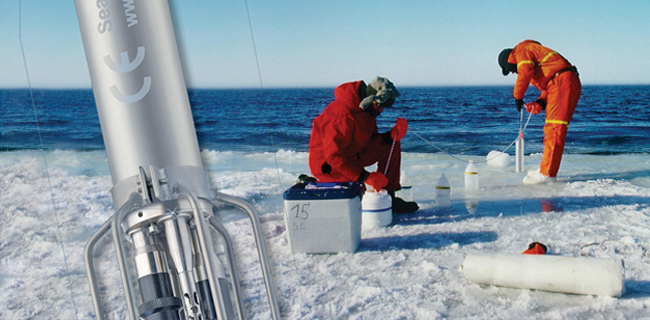
2021年4月13日,天气晴朗,海域状态良好,依据海洋研究一所王副研究员的要求,有本公司研制的底座抛弃式海床基在青岛沙子口进行海试,...
详情 >>
南海浮标设备回收及布放 2019年12月15日-19日,青岛霍金海洋高新科技有限公司工程人员与自然资源部第一海洋研究所数名物理海洋研究员,...
详情 >>
2019年9月28日至2019年10月1日,青岛霍金海洋高新科技有限公司工程人员与自然资源部第一海洋研究所数名物理海洋研究员共7人,搭载湛江科...
详情 >>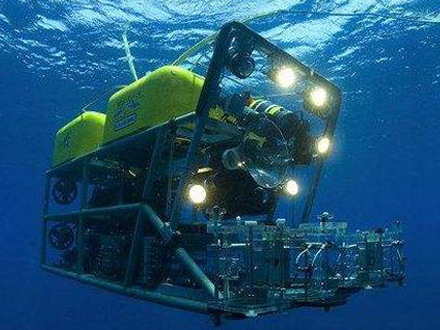
这是CTD工程案例,设备如图,欢迎来电咨询!...
详情 >>
这是CTD工程案例,设备如图,欢迎来电咨询!...
详情 >>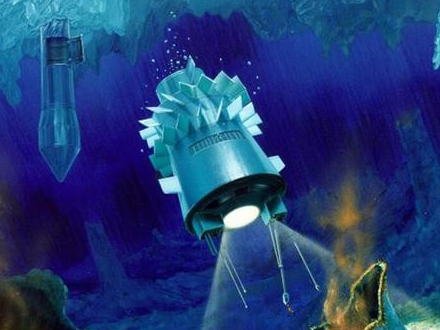
这是CTD工程案例,设备如图,欢迎来电咨询!...
详情 >>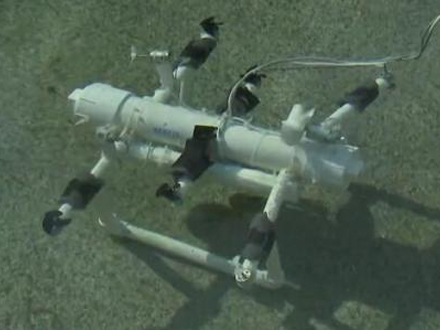
这是CTD工程案例,设备如图,欢迎来电咨询!...
详情 >>及时了解我们最新资讯与相关专业知识,掌握全面的专业海洋系统知识!

声学多普勒海流剖面仪布放 4月24日,有青岛霍金海洋高新科技有限公司主要牵头组织,某石化公司的声学多普勒海流剖面仪在线系统在日照岚山港油6泊位...

海床基主要用于搭载海洋观测传感器,如潮位仪水质传感器、溶解氧传感器和流速仪等。使用时投放到海床表面,进行海洋数据的观测和收集任务。 我们这...

海床基海洋传感器对海洋监测的重要性 海床基海洋仪器设备的一个最大特点是,生产批量小、应用范围窄、使用寿命短,而稳定、可靠性和一致性,以及测...
建设 海床基 海底观测系统,需要在以下几个方面进行技术攻关: 一是开展海洋环境仿真及特征分析; 二是研制海底观测网深海湿插拔连接器,攻克海底观...
实施 透明海洋战略,就是 围绕加快建设海洋强国战略需求,以提升全球海洋信息获取、分析和预报能力为目标,以综合化、体系化、智能化、动态化为特...
声学多普勒海流剖面仪布放 4月24日,有青岛霍金海洋高新科技有限公司主要牵头组织,某石化公司的声学多普勒海流剖面仪在线系统在日照岚山港油6泊位...
2022-04-27海床基主要用于搭载海洋观测传感器,如潮位仪水质传感器、溶解氧传感器和流速仪等。使用时投放到海床表面,进行海洋数据的观测和收集任务。 我们这...
2020-06-28海床基海洋传感器对海洋监测的重要性 海床基海洋仪器设备的一个最大特点是,生产批量小、应用范围窄、使用寿命短,而稳定、可靠性和一致性,以及测...
2020-06-01建设 海床基 海底观测系统,需要在以下几个方面进行技术攻关: 一是开展海洋环境仿真及特征分析; 二是研制海底观测网深海湿插拔连接器,攻克海底观...
2020-05-06专注海洋信息技术研发及应用,船舶技术研发;海洋环境监测;海洋信息服务;船舶仪器设备及配件、科研实验仪器的贸易及安装;海洋工程施工等

鲁公网安备37021002001174
备案号:鲁ICP备19031280号 卓信网络 海床基 有缆海床基 立体成像海浪采集系统






 做良心产品,做放心工程
做良心产品,做放心工程